Smart MPC®
Smart MPC®
Smart MPC®とは
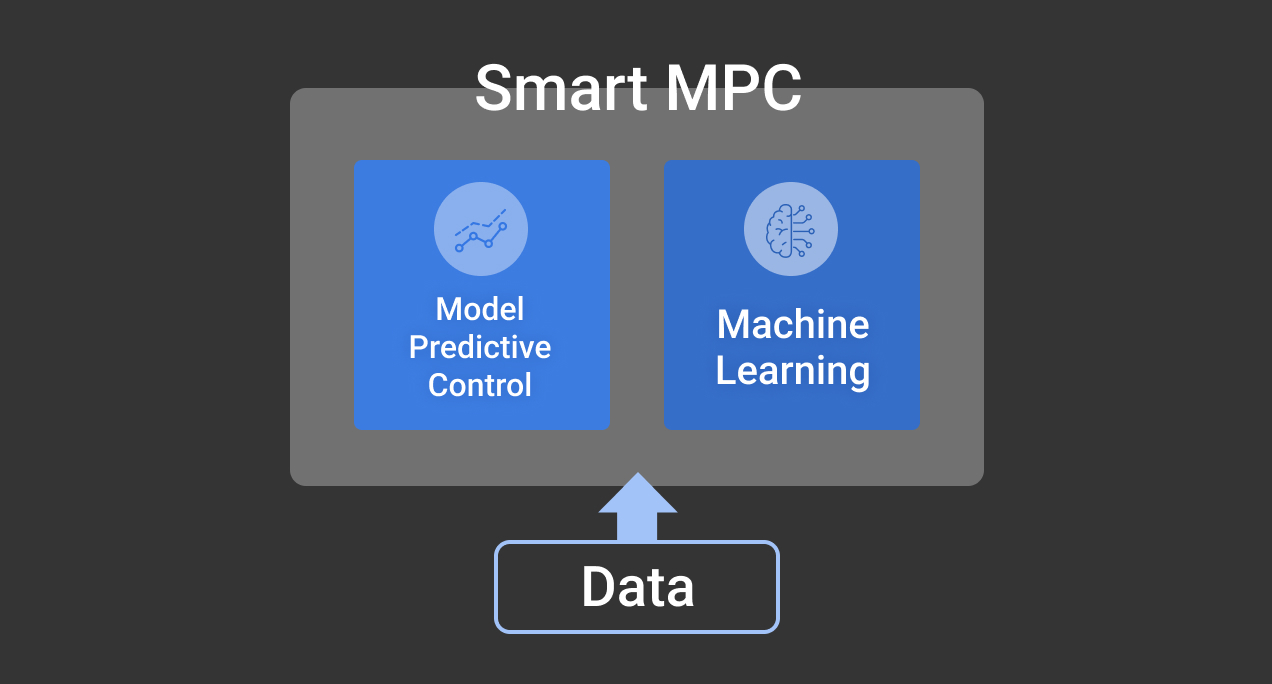
Smart MPC®は、モデル予測制御(Model Predictive Control)と機械学習(Machine Learning)を組み合わせた制御アルゴリズムです。
モデル予測制御(Model Predictive Control)の長所を引き継ぎつつ、その欠点であるモデリングの難しさを機械学習(Machine Learning)による
データドリブンな方法で解決します。
この技術によって、データを取る環境さえ用意することが出来れば、
導入コストが高いモデル予測制御を比較的簡単に運用可能になります。
Smart MPC®は、常に最新のデータに基づいて制御モデルをアップデートし続けるため、
経年劣化や設備更新に伴う制御性能の低下にも柔軟に対応可能です。
従来は人手に頼っていた制御操作やチューニングも自動化され、
安定した性能を維持しながら、運用負荷の軽減を実現します。
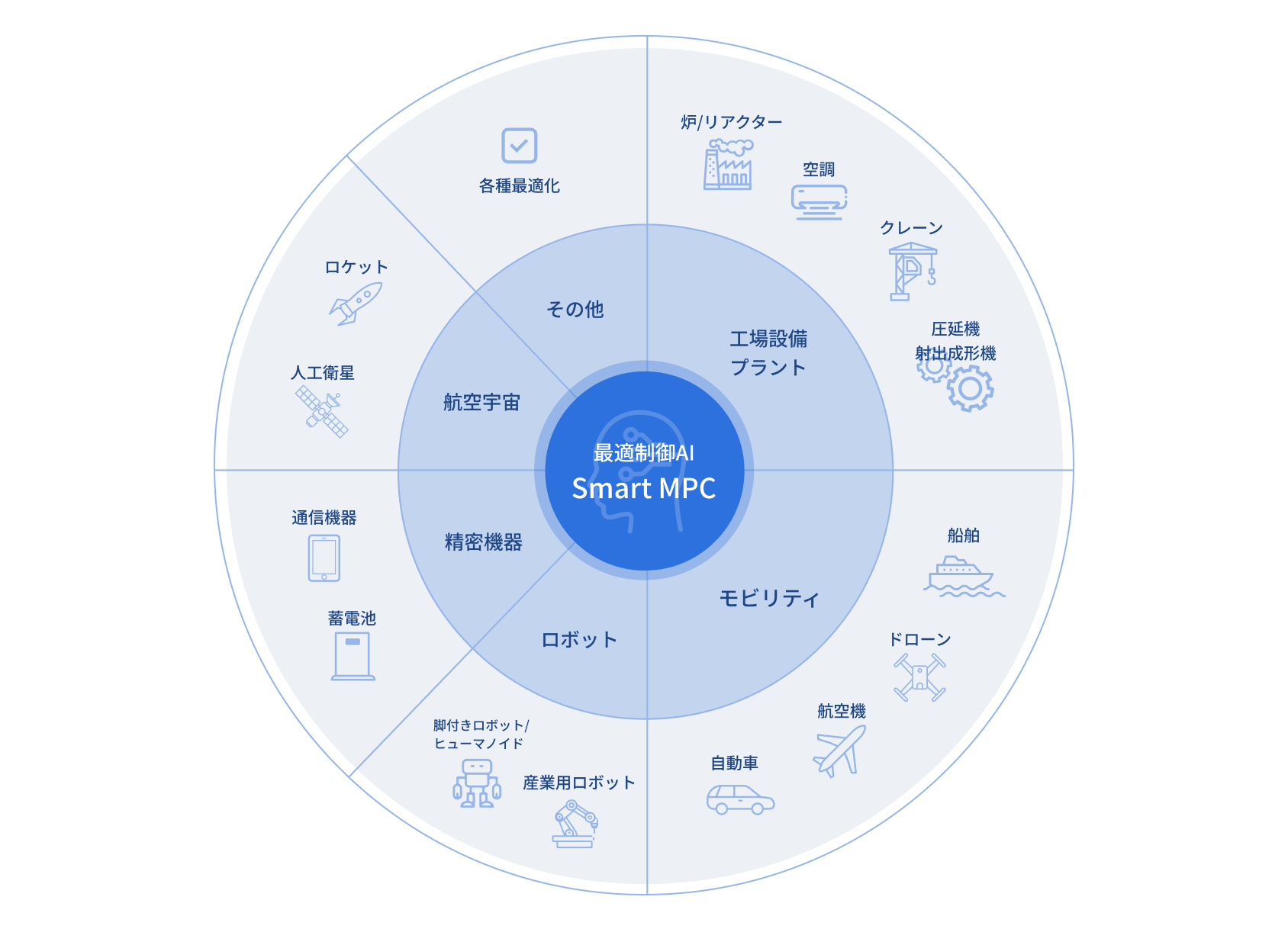
下図は、Smart MPC®がすでに活用されている、あるいは今後適用可能な領域を示した例です。
工場設備やモビリティ、ロボット、航空宇宙といった幅広い分野・機器に対応可能です。


アーキテクチャ
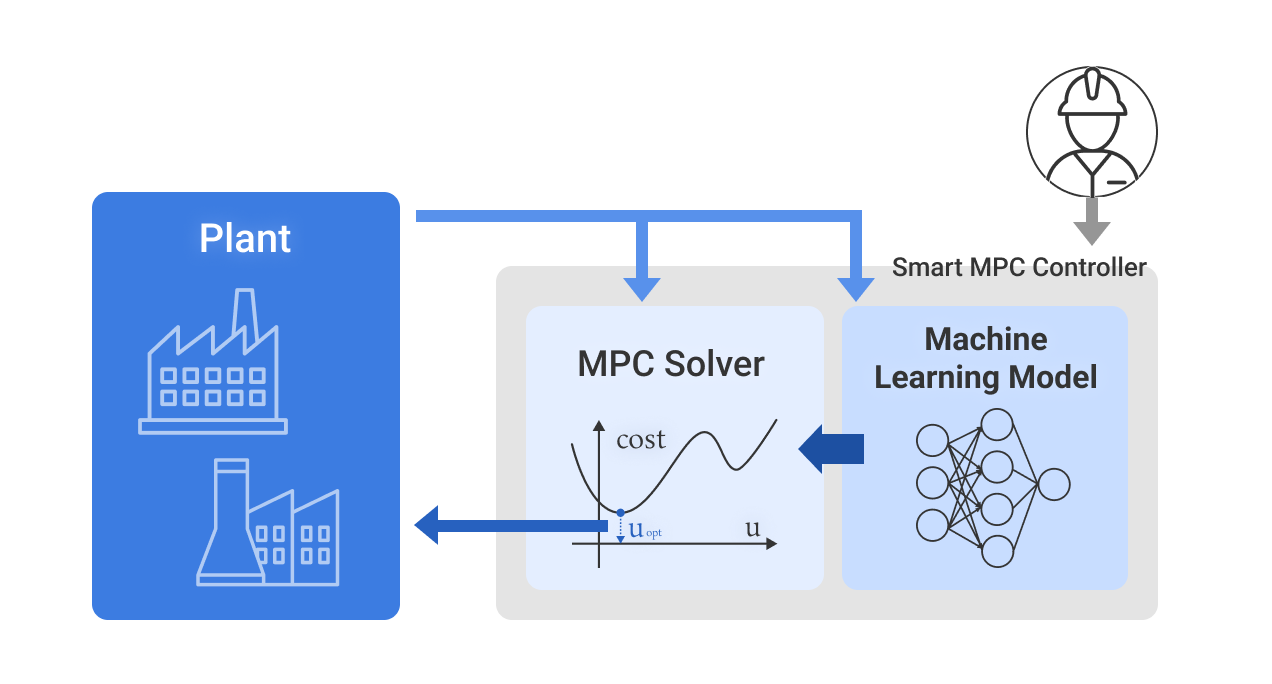
制御システムは制御対象(プラント等)と制御器の2つの要素から構成されています。
制御器の中にはプラントのダイナミクスを模倣するための機械学習モデルと、
MPC(モデル予測制御)に用いるための数理最適化ソルバーが存在します。
機械学習で得られたモデルはMPCの計算に使われ、毎ステップ(例えば10秒ごと)に
最適な制御入力 \( u_{\mathrm{opt}} \) を計算し、プラントに渡します。
倒立振子による実証実験
以下の動画は、Smart MPC® によって倒立振子を「学習しながらリアルタイム制御」している様子を収めたものです。
本実験では、各種パラメータを適当に設定した場合でも、わずか数エピソードで学習が収束し、ポールを安定して立て続けることに成功しました。
DQN(Deep Q-Network)をはじめとする深層強化学習を用いて同様の実験を行うと、数百エピソードを必要とする上、学習が進むと性能が劣化するケースも多く、
安定した学習には高度なノウハウが求められます。
また、PID制御ではドリフトが起こりやすく、それを防ぐためには熟練した調整スキルと多くの時間が必要となります。
本実験において、Smart MPC® はノートPCのCPU上でも 1step = 0.04 秒で制御を行うことが可能でした。計算量の軽さといった面からも、非常に扱いやすく、現場導入に適したアルゴリズムだと考えています。
